Technologie du moteur asynchrone triphasé à cage.
Démarrage et variation des moteurs asynchrones à cage.
I. Constitution :
Le moteur asynchrone triphasé, qui est le récepteur de puissance des installations
industrielles, est formé d’un :
- Stator : la partie fixe du moteur. Il comporte trois bobinages (ou enroulements)
qui peuvent être couplés en étoile
Y ou en triangle
∆ selon le réseau d’alimentation.
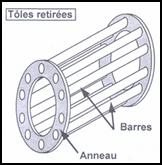
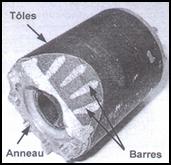
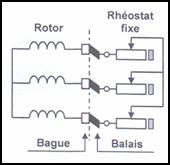
- Rotor : la partie tournante du moteur. Cylindrique, il porte soit un bobinage
(d’ordinaire triphasé comme le stator) accessible par trois bagues et trois balais
(figure 3), soit une
cage d’écureuil non accessible,à base de barres conductrices en aluminium
(figures1et 2).
Dans les deux cas, le circuit rotorique est mis en court-circuit (par des anneaux ou
un rhéostat)
Le moteur asynchrone à cage est très répandu dans le domaine industriel, de par sa
grande robustesse mécanique, son faible coût et sa très bonne standardisation. La
plage des puissances des machines asynchrones s’étend de la centaine de Watts
à la dizaine de Mégawatts.
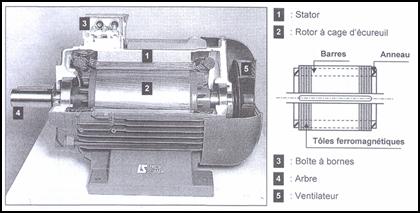
Figure 4 : le moteur asynchrone triphasé
II . Branchement du moteur asynchrone tripahsé :
Le stator d’un moteur asynchrone triphasé comporte trois enroulements identiques
qui sont couplés :
- Soit en étoile (Y)
- Soit en triangle (∆)
Le choix du couplage dépend :
Des indications portées sur la plaque signalétique qui donne les conditions
- normales de fonctionnement (dites aussi nominales).
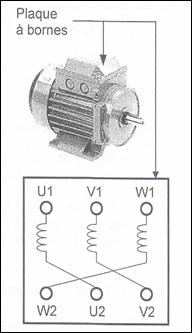
L’utilisateur choisit le couplage qui convient par l’intermédiaire de la plaque à borne
du moteur, qui comporte six bornes auxquelles sont reliées les entrées et les sorties
des trois enroulements
Normalisation des bornes :
Entrées : U1, V1 et W1. Sorties : U2, V2 et W2.
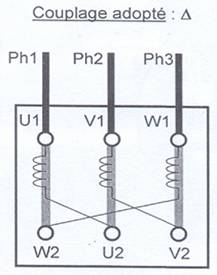
Détermination du couplage :
1.si la plus petite tension de la plaque signalétique du moteur correspond à la
tension entre phase du réseau on choisit le couplage triangle ∆.
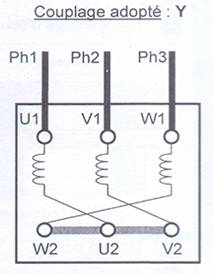
2.si la plus grande tension de la plaque signalétique du moteur correspond à la
tension entre phase du réseau on choisit le couplage étoile Y.
|
Réseau d’alimentation
|
Plaque signalétique
|
Couplage adéquat
|
|
220v
|
380 v
|
220 v
|
380 v
|
ETOILE
|
|
220 v
|
380 v
|
380 v
|
660 v
|
TRIANGLE
|
|
Tension simple
|
Tension composée
|
Tension d’un enroulement
|
Tension de deux enroulements
|
|
III . Principe de fonctionnement :
Les bobinages statoriques, alimentés par des courants triphasés de pulsation
w,créent un champ magnétique B tournant à la vitesse Ws=w/p où p est le
nombre de paire de pôles au stator.
Ce champ (flux) tournant balaie le bobinage rotorique et y induit des forces
électromotrices (fèm) d’après la loi de Lenz. Le bobinage rotorique étant en
court-circuit, ces fém y produisent des courants induits.
C’est l’action du champ tournant B sur les courants induits qui crée le couple
moteur. Ce dernier tend à réduire la cause qui a donné naissance aux courants,
c’est à dire la rotation relative du champ tournant par rapport au rotor. Le rotor
vadonc avoir tendance à suivre ce champ.
Le rotor tourne forcément à une vitesse W < Ws (d’où le terme asynchrone).
Pour changer le signe de Ws (donc le sens de rotation), il suffit de permuter
deuxfils de phase.
IV.Problème de démarrage des moteurs asynchrones:
Le branchement du moteur au réseau de distribution peut se réaliser :
1. Sans perturbation pour les autres récepteurs et sans détérioration du
moteur :l’équipement de démarrage est dit à démarrage direct.
2. Avec perturbations à la fois pour le réseau et les autres récepteurs ou
avec détérioration du moteur : l’équipement de force motrice doit assurer le
démarrage suivant un procédé qui élimine ou qui réduit dans leurs limites
réglementaires ces perturbations et qui évite toute détérioration.
D’une façon générale et quel que soit le type de moteur, les différents procédés
de démarrage ont pour objectif la réduction de l’intensité de démarrage.
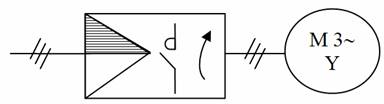
V. Démarrage direct :
V.1 Principe :
Dans ce procédé le stator du moteur est branché directement sur le réseau
d’alimentation triphasé. Le démarrage s’effectue en un seul temps.
V.2 Caractéristique technique :
Seuls les moteurs asynchrones triphasés avec rotor en court-circuit ou rotor à
cage peuvent être démarrés en direct.
Au démarrage du moteur la pointe d’intensité est de l’ordre de 4 à 8 fois
l’intensité nominale.
Le couple au décollage est important, environ 1,5 fois le couple nominal.
V.3 Démarrage direct semi-automatique un sens de
marche :
On veut démarrer un moteur asynchrone triphasé dans un sens de rotation
par un bouton poussoir S1 et l’arrêter par l’appui sur un bouton poussoir S0.
V.3.1 Schéma fonctionnel :
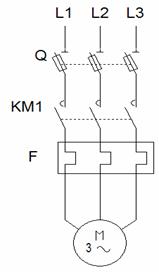
V.3.2 Circuit de puissance :
|
|
L1, L2, L3 : alimentation triphasée
Q : fusible sectionneur
KM1 : contacteur principal 1
F : relais thermique
M : moteur triphasé
|
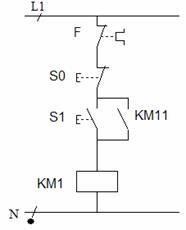
V.3.3 Circuit de commande :
|
|
F : contact auxiliaire du relais thermique
S0 : bouton poussoir arrêt
S1: bouton poussoir marche
KM1 : bobine du contacteur
KM11 : contact auxiliaire du contacteur
|
V.4 Démarrage direct semi-automatique deux sens
de marche :
On veut démarrer un moteur asynchrone triphasé dans deux sens de
rotation,par un bouton poussoir S1, on commande le sens 1 et on
démarre le sens 2 par un bouton poussoir S2 et l’arrêter par l’appui sur
un bouton poussoir S0.
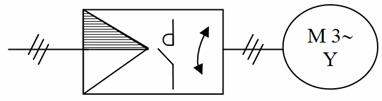
V.4.1 Schéma fonctionnel :
V.4.2 Circuit de puissance :
|
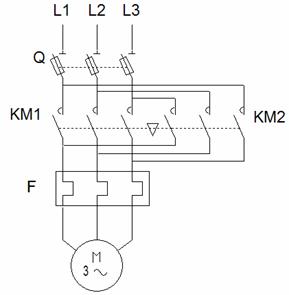
|
KM1 : contacteur sens 1
KM2 : contacteur sens 2
|
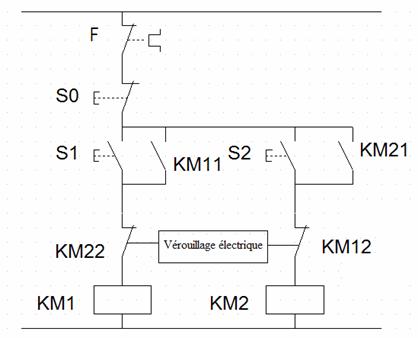
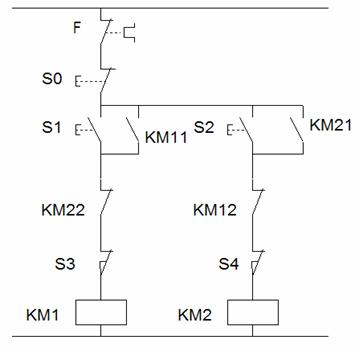
V.4.3 Circuit de commande :
V.5 Démarrage direct semi-automatique deux sens de marche
avec butées de fin de course:
On veut démarrer un moteur asynchrone triphasé dans deux
sens de rotation. Chaque sens est arrêté par une butée de fin
de course, respectivement S3 pour le sens1 et la butée S4
pour le sens 2.
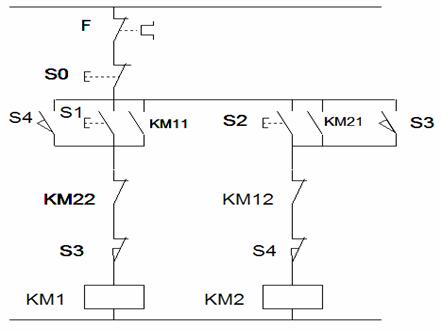
V.5.1 Circuit de commande :
|
|
|
S3 : butée de fin de course pour le sens 1
S4 : butée de fin de course pour le sens 2
|
V.6 Démarrage direct semi-automatique deux sens de marche avec
butées de fin de course et inversion du sens de rotation:
Dans cet exemple, lorsque une des deux butées de fin de course est
actionnées, le sens de rotation est inversé automatiquement.
V.6.1 Circuit de commande :
|
|
|
Les butées de fin de course possèdent deux contacts : un ouvert au repos l’autre fermé au repos.
|